磁壁移動型スピン光変調デバイス
広視域電子ホログラフィーの実現に向けて,電流注入により磁壁(DW)移動を行うことで磁化を反転させて光を変調させる磁壁移動型スピン光変調デバイスの研究を進めている。今回,本デバイスの基本動作を検証するため,ガドリニウム鉄Gd[(X)%]-Fe[(100-X)%]組成からなる磁性細線の両端に磁化方向を反平行とするDW生成用の2つのナノマグネット(NM)を形成したデバイスを作製した。デバイスに注入する電流の向きによりDWが拡大・縮小することを確認し,磁化反転を注入する電流の向きで制御できることが分かった。また,最速のDW移動は,Gd-Fe磁性細線の組成が磁化補償組成よりもわずかにFeが多いGd(22.7%)-Fe(77.3%)で得られた。この組成はGdとFeの角運動量が互いに打ち消す角運動量補償組成であり,DW移動を低電流かつ高速に行えることを示した。
1.はじめに
当所では,広視域電子ホログラフィーの実現に向けて,スピン注入磁化反転*1と磁気光学効果(磁気カー効果*2)を組み合わせた,超高精細スピン注入型空間光変調器(スピンSLM:Spin-Spatial Light Modulator)の研究を進めている1)2)3)4)。スピンSLMは,1µm以下の狭画素ピッチ化が可能であり応答速度も速いため,視域角が30度以上の広視域3次元映像表示への応用が期待できる。しかし,光変調のための磁化反転に大きな電流が必要で,電流低減が課題であった。従来のスピンSLMでは,我々が目指している画素ピッチ1µmを想定した場合には,磁性体からなる光変調部のデバイスサイズは0.7µm (長さ)× 0.5µm (幅)程度であり,磁性体薄膜と垂直方向に電流を流すために,電流路の断面積は0.35µm2である。一方,本稿で取り扱う磁壁*3移動型の光変調デバイスでは,電流を磁性体薄膜の面内方向に注入し,電流注入磁壁移動5)(Current Induced Domain Wall Motion)という磁化反転を用いて光を変調するために,電流路の断面積は 0.01µm (膜厚)×0.5µm (幅)=0.005µm2 と二桁以上小さい。このため,磁化反転に要する電流密度が従来のスピンSLMと比べて大幅な反転電流削減が期待できる。また,磁気光学材料である希土類遷移金属(RE-TM:Rare Earth Transition Metal)合金はその組成の調節によって飽和磁化(Ms)や磁気モーメント*4 を調節することが可能で,Msや磁気モーメントが小さい組成を狙うことで,低電流駆動や高速な磁壁移動が期待できる6)7)8)。しかし,このRE-TM合金を用いた光変調デバイス応用については多くは調べられていない。そこで,本報告では電流注入磁壁移動を用いたデバイスの作製と基本動作およびRE-TM合金の組成依存性などについて報告する。
2.磁壁移動型スピン光変調デバイスの動作原理と基本動作検証
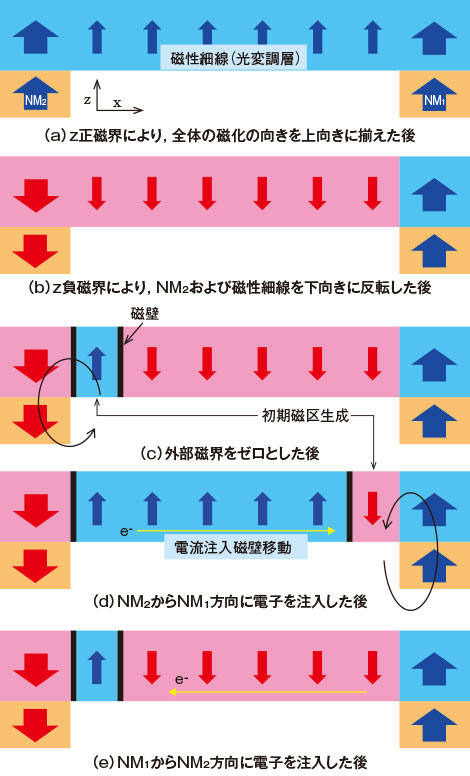
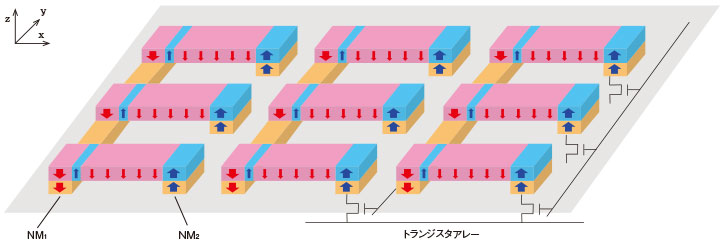
1図に示すように,磁壁移動型スピン光変調デバイスは2つの微小永久磁石(Nano magnet) のNM1, NM2からなる磁化固定層(強磁性薄膜),光変調層(磁性細線)で構成される。この時に各部分の保磁力*5(Hc)の大きさはHc-NM1>Hc-NM2>Hc-磁性細線となるように材料や組成などを調節する。2図はデバイス断面の模式図であり,これを用いて本デバイスの初期磁区生成および電流注入による磁化反転の様子を説明する。デバイス全体に十分大きな上向きの磁界を印加し,磁性細線およびNM1, NM2の磁化の向きを上向きに揃える(2図(a))。その後NM1の磁化を反転させないHc-NM1よりも小さな磁界を下向きに印加し磁性細線およびNM2のみを反転させる(2図(b))。この一連の動作によってNM1およびNM2の磁化方向は互いに反平行とすることができる。この後,磁界をゼロとするとNM2から発生する局所的な磁界によって,磁性細線の一部(NM2付近)の磁化が上向きに反転し,初期磁区が生成される(2図(c))。この初期磁区と右隣の磁区の間には磁壁が存在する。ここに電子をNM2側から注入(電流はNM1側から)させることで磁壁が右方向に移動し,磁性細線の磁化が上向きに反転する。NM1側に磁壁が移動すると,NM1からの局所的な磁界によって磁壁が停止し,NM1側に初期磁区が残る(2図(d))。また,電子をNM1側より注入(電流をNM2側から注入)させることで磁壁は左方向に(NM2側に)移動し,磁性細線の磁化が下向きに反転する(2図(e))。光変調層に直線偏光を照射させると,磁気光学効果により,磁化の向きに応じて反射光の偏光面が回転するため,デバイスに流す電流の向きで磁化の向き,すなわち偏光面の回転を制御する光変調デバイスとして機能させることができる。
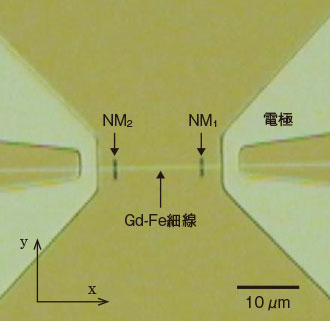
3図は,今回試作した基本動作検証用デバイスの光学顕微鏡像(2図を上方から見た図)である。実際の磁壁移動型スピン光変調デバイスでは,1図に示すようにデバイスの下部に設置したトランジシスタからNM1およびNM2を経由して磁性細線に電流を注入させて磁化を反転させる。しかし,今回試作した検証用デバイスでは,作製を容易にするためNM1, NM2からの電流注入ではなく,NM1, NM2より外側まで延長した磁性細線上に電極を形成し,この電極から電流を注入させる構造とした。この構造ではNM1, NM2に電流は流れないが,初期磁区生成や磁壁移動特性には大きな影響を与えないと考えている。
NMはコバルト(Co)とパラジウム(Pd)材料を積層した多層構造薄膜(Co/Pd多層膜)であって,CoとPdの膜厚を変化させることで保磁力(Hc)を調整できる。また,磁性細線は,RE-TM合金の中でも垂直磁気異方性*6が低く低電流駆動が期待されるGd-Fe合金を選択し,マグネトロンスパッタ装置を用いて製膜した。なお,膜構成は以下の通りであって,( )内は膜厚nmである。
NM1:ルテニウム(3)/白金(3)/[Co(0.3)/Pd(0.6)]25/ルテニウム(3),
NM2:タンタル(2)/白金(2)/[Co(0.5)/Pd(0.8)]17/タンタル(3),
NM1, NM2はそれぞれ0.5×3µmの矩形形状にパターニングされており,Hcはそれぞれ4000Oe(エルステッド),1500Oeである。この2つのNM上に橋渡しするようにGd-Feからなる磁性細線(幅0.5µm)が形成されている。電流注入による磁壁の移動距離を計測するためにNM1とNM2の間隔は17µmとしている。実際のSLMではこの間隔が画素の大きさを決めるため,1µm程度の長さとなる。まず,素子全体に5000Oeの上向きの磁界を印加しNM1とNM2を揃え(2図(a)),その後3000Oeの下向きの磁界でNM2のみ反転させる(2図(b))ことで,NM1, NM2の磁化方向を互いに反平行とした。
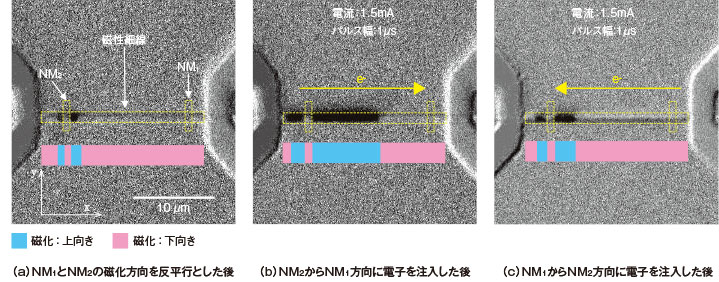
4図(a)はNM1, NM2を互いに反平行とした後の磁気光学像(2図(c)を上方から見た図)である。黄色破線の補助線でNM1, NM2, および磁性細線を記した。NM2の両側が黒くなっており,2図(c)の動作に示した磁性細線に初期磁区が生成されていることが分かる。この状態でパルス電流(1.5mA, 1µs)を左方向(電子を右方向)に注入することで,4図(b)ではNM2の両側の黒い部分のうち,右側の黒い部分が右方向に伸びた。2図(d)に示したように磁壁は電子の動く方向に移動しており,これまでに報告された現象と同様にこれは電流注入磁壁移動であると考えられる。また4図(c)では先ほどと逆向きの右方向(電子を左方向)に電流(1.5mA, 1µs)を注入することで2図(e)に示したように磁壁は左方向に縮んだことが分かる。このように電流を流す向きによって磁化の方向を制御し,光を変調できることが実証できた。

3.ナノマグネット(NM)の保磁力制御
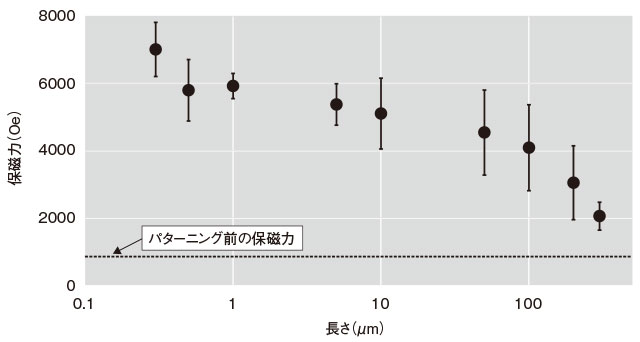
磁壁移動型スピン光変調デバイスの動作には,NM1とNM2の異なる保磁力が必要である。2節(動作原理と基本動作検証)では異なる材料を用いることで異なる保磁力を実現したが,NM1, NM2の形成には2段階の微細加工プロセスが必要であった。同一の材料で異なる保磁力を持つNMを作製できれば,プロセス工程を減らすことで位置合わせ誤差を低減することができる。そこで,NM1とNM2を異なる形状とすることで,保磁力の異なるNMを作製可能であるかを検討した。今回,1図x軸方向のNMの長さは2つとも100nmに固定し,y軸方向の長さは0.3~300µmとすることで磁性細線と垂直な方向のNMの長さを変えた。NMには,前節と同様Co/Pd多層膜を用い,作製手順も同じとした。また,作製したNMの保磁力のばらつきを評価するために,同じ設計のNMを10個ずつ作製した。5図に,作製した各NMの中心部の平均保磁力と標準偏差を示す。また,点線はNMのパターニング前のCo/Pd多層膜の保磁力を示す。Co/Pd多層膜の保磁力は850Oeであったが,NMに加工後の保磁力は,300µmの長さで約2000Oe,1µm以下の長さでは6000Oe以上に増加した。NMが長い場合は,磁化反転の核となる微小磁区が多数発生し核を起点に磁区が広がるため,小さい磁界で磁化反転が起きる。これに対して,長さを短くした場合には,核の生成確率が低下し,保磁力が増加したために磁化反転が起こりにくいと考えられる。この結果から,適切な長さのNMを選択することで,同じ材料から保磁力の異なるNMが得られることが分かった。
NMの長さによる保磁力を調整する手法は,磁壁移動型スピン光変調デバイスのアレー化にも有効である。簡単な例として,6図に示すように磁壁移動型スピン光変調デバイスを縦横3個ずつ並べたデバイスアレーで説明する。NM1とNM2はy軸方向に異なる長さとし,NM1はy軸方向の隣接画素と接続させる。NM1が隣接画素と接続された場合であっても,マトリックス状に形成されたトランジスタアレー(アクティブマトリックス駆動方式)により,各画素は独立して駆動可能である。NMの長さによる保磁力を調整する手法では,NMと磁性細線の重ね合わせ誤差が小さくなるため,高密度なデバイスの作製を容易にすることができる。
4.Gd-Fe光変調層の組成と電流注入磁壁移動
磁性細線にRE-TM合金を光変調層として用いた場合に磁壁移動の駆動電流が低減されるという報告がされている6)7) が,RE-TM合金を構成するGdとFeの組成比率(Gd-Fe組成)によって初期磁区生成や電流注入磁壁移動特性は大きく変わることが予想される。本節ではGd-Fe組成がそれら特性にどのように影響するかについて報告する。
4.1 Gd-Fe光変調層の組成と磁化について
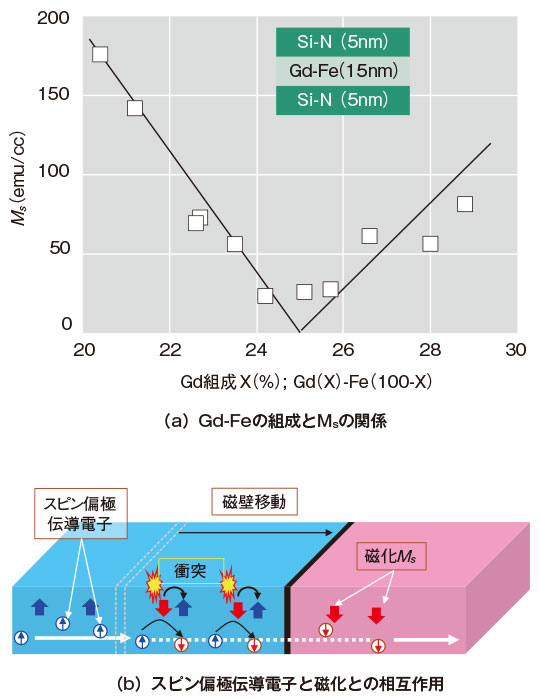
Gd-Fe基礎特性の把握をするために,さまざまな組成のSi–N(窒化ケイ素)/Gd[(X)%]-Fe[(100-X)%]/Si–N薄膜について飽和磁化(Ms)を調べた。Gd-Fe合金ターゲットとFeターゲット,GdおよびFeのターゲットからの同時製膜を行うことでGd-Fe合金薄膜を作製した。7図(a)に横軸をGd組成(%),縦軸を飽和磁化Ms (emu/cc) としたMsの組成依存性を示す。Gd20%からGdを増やしていくとMsが減少しGd25%でMsがほぼゼロとなり,さらにFeを増やすことでMsは増加した。Gd-Fe合金中のGdの磁気モーメントはFeのおよそ3倍で磁化の向きは互いに反対を向いているため,GdとFeの組成を変えることでさまざまなMs値とすることが可能であり,Gd組成とFeの組成がおよそ1:3の時(Gd25%,Fe75%)に飽和磁化がゼロである補償組成となる。電流注入磁壁移動では7図(b)に示すように磁化が下向きのGd-Fe内では伝導電子のスピンは上を向いており,上向きにスピン偏極した伝導電子(上向きスピン)が下向き磁化に注入されて下向き磁化との衝突により磁化が反転する*7(磁壁が移動する)。このためMs値が小さいほどこの現象は顕著になり,Gd-FeのMsに大きく依存することが予想される。
4.2 磁壁の移動速度とGd-Fe組成
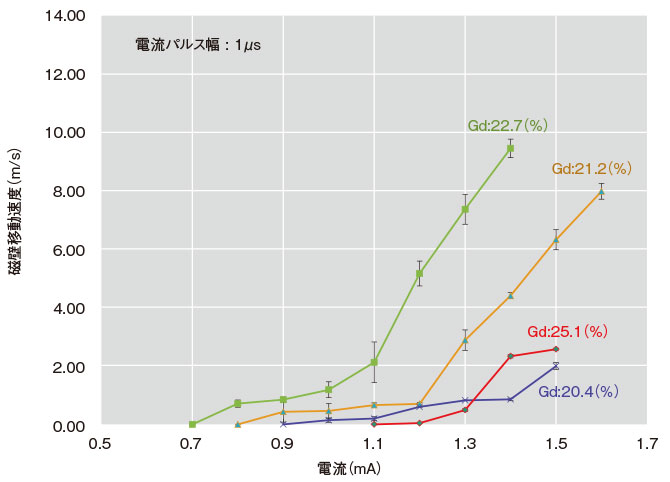
磁壁移動型スピン光変調デバイスでは,磁壁移動速度が速いほど短時間で駆動ができるため,SLMの時分割表示を行った場合には,表示画像のフレームレートの高速化が可能となる。このため,磁壁の移動速度は時分割でのカラー化やグレースケールの実現に向けた重要な性能指標となる。この磁壁の移動速度を定量評価するために,磁壁の移動距離および注入したパルス電流のパルス幅(時間)から磁壁の移動速度を計算した。磁壁は電流注入中にのみ一定の速度で進むと仮定して磁壁の移動距離÷パルス幅を計算するとともに,同じ実験を5回繰り返して求めた計算結果の平均値を移動速度とした。この磁壁移動速度は高速であるほど駆動時間が短く,高速でのSLM駆動が可能となる。8図にさまざまなGd-Fe組成における駆動電流と磁壁移動速度の関係を記す。Gd-Fe組成によって磁壁移動速度は大きく異なり,どの組成においても磁壁移動速度は駆動電流が大きいほど高速であった。Gd(22.7%)-Fe(77.3%)において,磁壁移動が起きる電流が0.8-1.0mAと画素ピッチ1µmの微細なバックプレーントランジスタで駆動できるレベルまで低減できることが分かった。また,この組成では,低電流においても比較的高速な磁壁移動速度が得られることが分かった。この結果は,Msが一番小さい補償組成であるGd(25.1%)-Fe(74.9%)ではなく,これに比べて若干Feが多い組成で磁壁移動が高速になった。これはMsの補償組成ではなく,角運動量の補償組成*8において磁壁移動が高速になっている可能性がある8)。
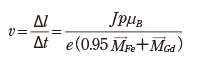
今回の実験に用いたGd-Feにおいても角運動量の補償組成での説明が妥当であるかを検証する。検証に用いるモデルとして,磁化が下向きの磁区と上向きの磁区の間に磁壁がある構造を考え,電流が下向き磁区から上向き磁区に流れるとする(9図)。またこの電流注入時に,下向きの磁区で生成した下向きスピン角運動量のすべてが上向きの磁区においてGd-Feの角運動量に移るモデルとする(スピン角運動量はロスなくすべてGd-Feの磁化反転に使われると仮定)。ここでpはスピン偏極率*9,ћはプランク定数*10,Jは電流密度,Aは磁性細線の断面積,Δtは注入した電流パルス幅,eは電気素量,µBはボーア磁子*11,MFeはFeの磁化,MGdはGdの磁化,Δlは磁壁の進んだ距離である。このモデルにてスピン角運動量の変化と磁壁移動によるGd-Feの角運動量変化が等しいということから,磁壁の移動速度を求めることができる(9図)。
 (1)
(1)
(1)式において,分母がゼロになる時(0.95MFe+ MGd=0)に磁壁の移動速度vが最大となる。磁化の補償組成である(MFe+MGd=0)に比べて,若干Feの磁化が大きい(Feが多い組成)でGd-Feの角運動量がゼロになり*12,磁壁の移動速度が最大となることが分かる。

5.まとめ
磁気光学効果を用いた磁壁移動型スピン光変調デバイスを考案し,試作・動作確認を行った。Hcの異なる2つのナノマグネットとGd-Feからなる磁性細線を組み合わせ,ナノマグネット(NM)の磁化方向を反平行とすることで,NMの脇に初期磁区を生成した。ここに注入する電流の向きにより初期磁区が拡大・縮小することを確認し,磁壁移動による磁化反転を注入する電流の向きで制御できることが分かった。さまざまな組成のGd-Feからなる磁性細線を作成し,GdとFeの角運動量が互いに打ち消す角運動量補償組成で磁壁移動が速くなることを確認した。さらに0.8-1.0mA程度での低電流で磁壁移動が起きており,バックプレーントランジスタでの駆動に目途がたった。